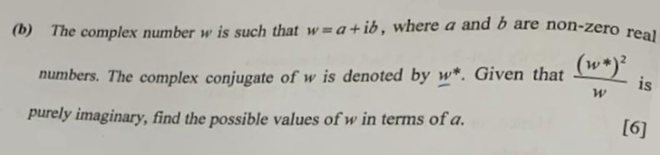
Show that $\displaystyle \frac{w-1}{w+1}$ can be expressed as $k \tan \frac{1}{2} \theta$, where $k$ is a complex number to be found.
In the video I introduced the “half-angle trick” using complex numbers in exponential/Euler form to solve the 2019 H2 Math Paper 1 Question 9 (ib). In this blog post I will illustrate a trigonometric approach.
The main key in a trigonometric approach involves the double angle formula: while the sine double angle is pretty straightforward $\sin 2A = 2 \sin A \cos A$, there are 3 different version of the cosine double angle formula $\cos 2A = \cos^2 A – \sin^2 A = 2 \cos^2 A – 1 = 1 – 2 \sin^2 A$. For this question (and in some other applications), the trick is to use the appropriate formula to eliminate any “1”s in the question. For example, in our working we will encounter $\cos \theta – 1$. If we let $\cos \theta = 1 – 2 \sin^2 \frac{\theta}{2}$, then $\cos \theta – 1 = 1 – 2 \sin^2 \frac{\theta}{2} – 1 = -2 \sin^2 \frac{\theta}{2}$, so the “$-1$” was eliminated. Similarly, when dealing with $\cos \theta + 1$, we want to use the other variant of the double angle formula to get $\cos \theta + 1 = 2 \cos^2 \frac{\theta}{2} – 1 + 1 = 2 \cos^2 \frac{\theta}{2}$.
The solution:
\begin{align}
\frac{w-1}{w+1}
&= \frac{\cos \theta + i \sin \theta – 1}{\cos \theta + i \sin \theta + 1} \\
&= \frac{1 – 2 \sin^2 \frac{\theta}{2} + i 2 \sin \frac{\theta}{2} \cos \frac{\theta}{2} – 1}{2\cos^2 \frac{\theta}{2} – 1 + i 2 \sin \frac{\theta}{2} \cos \frac{\theta}{2} + 1} \\
&= \frac{- 2 \sin^2 \frac{\theta}{2} + 2i \sin \frac{\theta}{2} \cos \frac{\theta}{2}}{2\cos^2 \frac{\theta}{2} + 2i \sin \frac{\theta}{2} \cos \frac{\theta}{2}} \\
&= \frac{2 \sin \frac{\theta}{2} (- \sin \frac{\theta}{2} + i \cos \frac{\theta}{2})}{2 \cos \frac{\theta}{2} (cos \frac{\theta}{2} + i \sin \frac{\theta}{2})} \\
&= \tan \frac{\theta}{2} \frac{- \sin \frac{\theta}{2} + i \cos \frac{\theta}{2}}{cos \frac{\theta}{2} + i \sin \frac{\theta}{2}} \times \frac{\cos \frac{\theta}{2}-i\sin \frac{\theta}{2}}{\cos \frac{\theta}{2}-i\sin \frac{\theta}{2}} \\
&= \tan \frac{\theta}{2} \frac{-\sin \frac{\theta}{2} \cos \frac{\theta}{2} +i\sin^2 \frac{\theta}{2} + i \cos^2 \frac{\theta}{2} -i^2 \sin \frac{\theta}{2} \cos \frac{\theta}{2}}{\cos^2 \frac{\theta}{2}+\sin^2 \frac{\theta}{2}} \\
&= \tan \frac{\theta}{2} \frac{-\sin \frac{\theta}{2} \cos \frac{\theta}{2} + \sin \frac{\theta}{2} \cos \frac{\theta}{2} +i(\sin^2 \frac{\theta}{2} +\cos^2 \frac{\theta}{2}) }{1} \\
&= \left ( \tan \frac{\theta}{2} \right) i
\end{align}
Hence $k= i$.


You must be logged in to post a comment.